2012 年 29 日(日)(10)HP05S搭載機体の飛行:(1)テール振れ
VIDEO
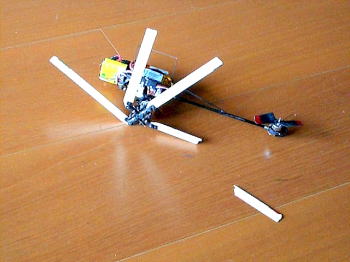
テール振れでノーコンになり墜落、ブレード折れる
メインブレードとテールブレードの組合せでの飛行比較
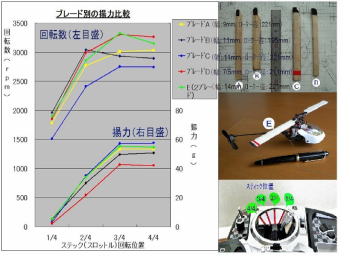
テール振れの比較 右上の動画は、メインブレード:4 枚と2枚、テールブレード径:50mm と60mm の4 つの組み合わせで飛行中のテール振れの状況を観察した。 振れは送信機のスロットルスティックを一気に上げた時に起きている。 メインブレード4 枚 2 枚よりテール振れが大きく、テールブレードの径が小さい(50mm ) 4 枚ブレード、2 枚ブレード共に1.7g (それぞれ枚数計)でメインブレードのトルクがテールの負荷に差を与えているようには思いにくい。しかし、ブレード前縁の風切り抵抗は4ブレードは2倍になるが、影響はあるものだろうか。テールモーターのパワーアップ
2012 年 7 月22 日(日)(9)HP05S搭載機体の出力(ブレード別の回転数、揚力)測定とパワーアップ確認
メインモーターとブレード別の回転数、揚力、揚力重量比 VIDEO 回転数と揚力の測定状況
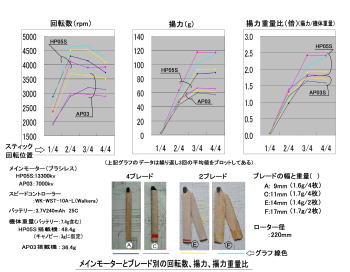
・下の写真をクリックして頂くと詳細がご覧いただけます。 (1 )メインモーターとブレード別の回転数、揚力、揚力重量比
(1.1 ) 回転数 a ) kv 値で比較 すれば、HP05S (13300kv )はAP03 (7000kv )の約2 倍3割増し程度 トルク負け HP05S の3本のリード線が各々4本撚り ターン数を少なくした高回転、低トルク型
(1.2)揚力
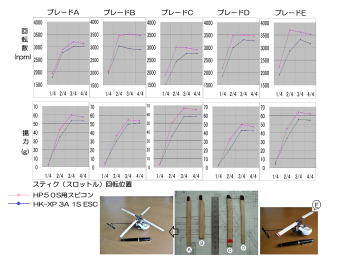
a ) ブレード幅の合計で翼面荷重的 揚力 2ブレードの方が高い 。 b) 単位幅揚力 2 ブレードで3.3g/mm 程度、4 ブレードで2.5g/mm 程度と枚数の違いとしてハッキリ別れた ブレードの幅は4種類(下表)と違うのに 同じ枚数で単位幅揚力が近値 になったのは 枚数特性 (?) 検証
ブレード種別 E F C A
(イ)揚力(g) 93 110 116 88
(ロ)ブレード枚数 2 2 4 4
(ハ)ブレード幅合計(mm) 28(2x14) 34(2x17) 44(4x11) 36(4x9)
(ニ) 単位幅揚力(g/mm )((イ)/(ハ)) 3.32 3.24 2.64 2.44
(1.3)揚力重量比
a )HP05S で機体重量の2.5 倍弱 が得られた。AP03 での2 倍弱からパワーアップ
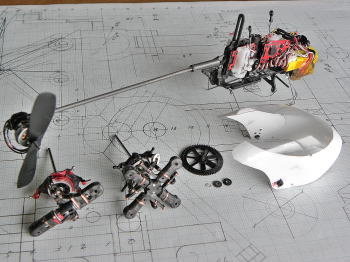
2012 年7 月15 日(日) (8 )メインモーターにHP05S を搭載する機体の製作(モーターパワーアップ)
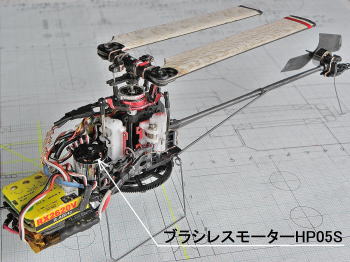
ブラシレスモーターHP05S を搭載 VIDEO ブラシレスモーターHP05S搭載機の飛行
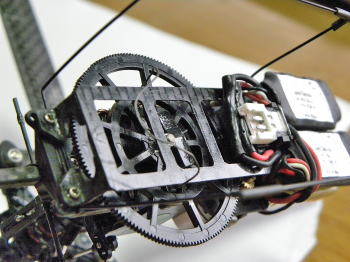
大きさ(キャノピー無し) 構成
メインローター直径: 220mm テールローター直径: 50 mm 全長:190mm 重さ:38g (バッテリー含まず) 受信機:RX2620V リニアサーボ:HK1300 (1.3g ) メインブラシレスモータ:HP05S テールブラシレスモータ:WK-WS-10-002 (Walkera ) スピードコントローラー(メイン):WK-WST-10A-L (Walkera ) スピードコントローラー(テール):WK-WST-10A-L6 (Walkera ) ピニオン:16T メインギヤ:HM-CB100-Z-15 Main Gear メインブレード:自作(バルサ材+カーボン板) テールブレード:Walkera HM-4#3B-Z-03 ( 参考)バッテリー:HP-LG325-0240-1S 3.7V240mAh 25C
・下の写真をクリックして頂くと詳細がご覧いただけます。
(1)メインモーターにHP05Sを搭載する機体の製作
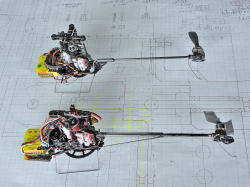
(2)モーターHP05SとAP03搭載機の比較
(3 ) HP05S 搭載機の飛行は、上昇追従性が AP03 搭載機より格段に良い。 2012 年7 月8 日(日) (7 )ブラシレスモータ(AP03 7000kv )のコイル巻き替えと揚力測定、飛行評価
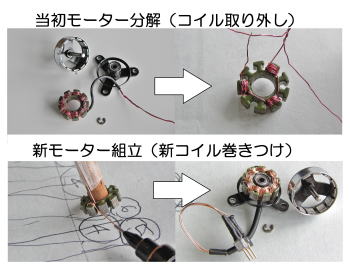
AP03 7000kv の分解とコイル巻き直し
出力を比較したブラシレスアンプ
VIDEO
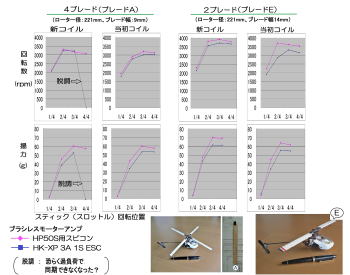
新、旧(当初)コイルでのモーターアンプ別の出力比較
新モーターでのアンプの違いによる飛行比較(1/4 〜4/4 )
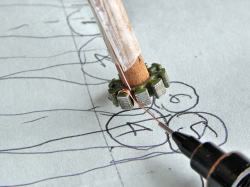
・下の写真をクリックして頂くと詳細がご覧いただけます。 (1 )当初モーター(AP03 7000kv )の分解 極数:9 、コイル線径:0.2mm 、巻き数:11or12 巻き/ 極(極により巻き数が違うように思えた)。 (2 )新モーター組立 コイル線径:0.23mm (ウレタン被覆)、巻き数:10 巻き/極。 (3 )出力比較
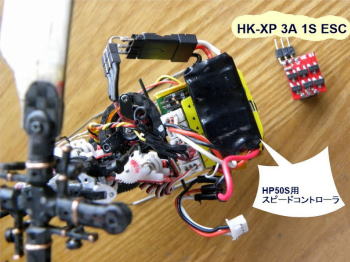
(3.1) 4ブレードでは a) 新コイルとHP05S 用スピードコントローラの組み合わせではスムースな飛行 HK-XP 3A 1S ESC の組み合わせでは、送信機のスロットルスティックをフルに上げたところで脱調となり出力が急低下 手で起動をかけて回転 失速墜落 2/4 )。
(3.2) 2ブレードでは HP05S 用スピードコントローラの組み合わせが若干出力が高く 3/4 )。b) 新コイルとアンプHK-XP 3A 1S ESC の組み合わせは、4 ブレードと同様に起動は手回転
(3.3) その他問題点 a) コイル巻き途中で線材とステータとのショートが頻発 。 絶縁塗装から突き出て 整列巻が出来ていない HK-XP 3A 1S ESC で起動がかからなかった 。 AP03 7000kv に起動がかかり難いことは以前から経験していた 。又、このアンプの許容電流との兼ね合いも懸念 新コイルではメインモーターの温度が異常に高くなった。 1 分で60 度以上になった感じがする(舌先での感じ)。
2012 年7 月1 日(日) (6 )ブラシレスアンプ(HK-XP 3A 1S ESC)とスピードコントローラ(ブラシレスモーターHP05S用)の出力比較
メインモーター用ブラシレスアンプの違いによる出力(回転数と揚力) VIDEO ブラシレスモーターHP05S 用スピードコントローラでの飛行
・下の写真をクリックして頂くと詳細がご覧いただけます。 (1 )揚力測定の準備状況と結果グラフ HP05S 用スピードコントローラの方がブラシレスアンプ(HK-XP 3A 1S ESC )よりも出力が高い。 飛行状況でも、HP05S 用スピードコントローラの方が上昇時の反応が良いように感じられた。 ローター径が同じ(ブレードA とB )では、ブレード幅が広いB が揚力が高いが、回転数では幅の狭いA が高 い。
2012 年6 月24 日( 日) (5 )超小型化4 ブレードローターでの揚力測定(ブレードのサイズ別比較)
揚力測定の準備状況 VIDEO 4 ブレードローターでの揚力測定
・下の写真をクリックして頂くと詳細がご覧いただけます。 (1) 台秤で揚力(引っ張り荷重)を量るために値が正しいか検証した。 (2)
ブレードのサイズ別に揚力の差が見られた。スロットルスティックの回転3/4 以上は、揚力は上昇していない。36g )に対してこのモーター系(含むアンプ)ではパワー不足に思える。 今後パワーアップとして、 他のスピードコントローラー(モーターHP05S 用)と組合せた場合の 出力と比較実験等を行いたい。
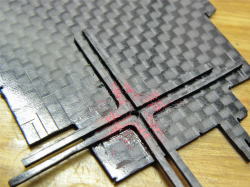
2012 年6 月17 日( 日) (4 )超小型4 ブレードローターヘッドの組み込み、ブレードの製作、飛行の比較
VIDEO 4 ブレードローターヘッドでのブレードの違いによる飛行比較
・下の写真をクリックして頂くと詳細がご覧いただけます。 2012 年6 月10 日( 日) (3 )超小型化4 ブレードローターヘッドの製作
4 ブレードローターヘッドの製作 VIDEO 4 ブレードローターヘッドの動き
・下の写真をクリックして頂くと詳細がご覧いただけます。 2012 年6 月2 日(土) (2 )Walkera 受信機とリニアサーボで超小型化
2 ブレード機 VIDEO 2 ブレード機の構造と飛行
大きさ 構成
メインローター直径: 220mm(自作ブレード) テールローター直径: 45 mm(京商CA 120) 全長:185mm 重さ:29g (バッテリー含まず)
受信機:RX2620V リニアサーボ:HK1300 (1.3g ) メインブラシレスモータ:AP03 7000kv 3.1g テールブラシレスモータ:WK-WS-10-002 (Walkera ) ブラシレスアンプ:HK-XP 3A 1S ESC 0.7g テールブラシレススピードコントローラー:WK-WST-10-L6 ピニオン:15T メインギヤ:70T (京商CA 120 CA0009 ) メインブレード:自作(バルサ材+カーボン板) テールブレード:京商CA 120用
・下の写真をクリックして頂くと詳細がご覧いただけます。
(1)全体
(2)ブレードホルダーとスワッシュプレート
(3)ブレード作製
2012 年5 月25 日(金) (1 )WalkeraV100D03BL のブレードを3 枚にしました
WalkeraV100D03BL のブレードを3 枚に VIDEO 3 ブレード機の構造と飛行
・下の写真をクリックして頂くと詳細がご覧いただけます。 (4)テールブレードのスプリング保持
メールは