| **** 第301 **** |
2018年5月6日(日) |
| スケールモデル4号機 |
|
|
|
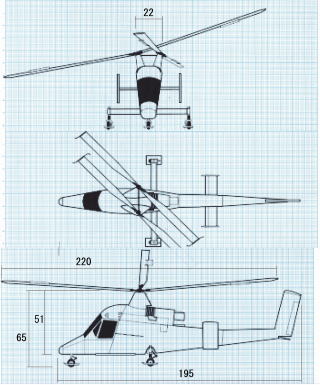
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
MK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (2)スワッシュプレートとサーボのリンケージ構造検討
- スワッシュプレートとサーボの連結を、従来のリンクロッドからワイヤー(下写真)に出来ないか試行する。
- (機体幅が狭小のため、サーボとスワッシュプレート用リンクロッドの配置スペースが確保しにくい)
-
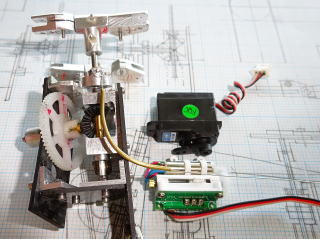 |
| ワイヤー連結のイメージ |
|
|
スワッシュプレート配置(続き)とリンケージワイヤー
|
 |
 |
|
|
|
| フレームの一部を切除してスワッシュプレート配置 |
ワイヤー(susφ0.2)とパイプ(黄銅φ1xφ0.6) |
|
|
|
- 次回(302)
- スワッシュプレートとサーボのワイヤー連結
|
|