| **** 第331**** |
2018年12月2日(日) |
| スケールモデル4号機 |
|
|
|
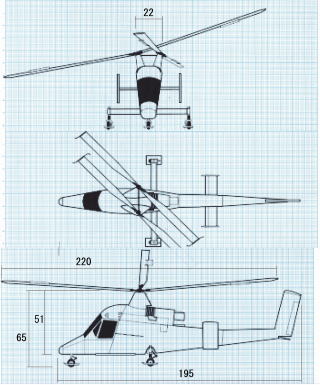
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
WK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (3)サーボ組み込み
- (i)サーボ調整
- ロ)ロター回転時の各部の動き(下動画)
- リンケージの概略位置調整を略済ませたところで可動部の動きを確認した。
- 更なる調整が必要な箇所はあるが、次回はローターブレードをセットしてトラッキング調整を行いながら様子を見つつ飛行確認の準備をする。
-
|
|
- 次回(332)
- トラッキング調整(調整飛行準備)。
|
|


