| ****第154**** | 2015年6月21日(日) |
|
|
 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。 |
|
 |
|||||||||||||||||
|
||||||||||||||||||
| 14 外観仕上げ |
| 14.2 飛行確認 | ||
|
 |
  |
|
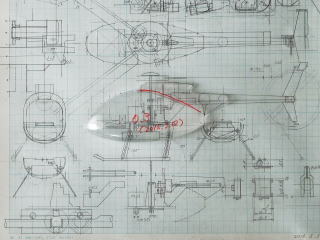
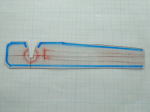
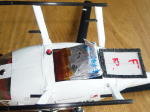
| 1)重心合わせ | 2)ブレードの放射軸(遠心力の軸芯)の概略合わせ | ||||
 |
 |
 |
 |
 |
|
| フェアリングを引っ掛けて重心合わせ | 遠心力重心線位置確認 | 重心線合わせゲージ | ブレード軸を重心線近傍にダンパーバネで保持 | ||
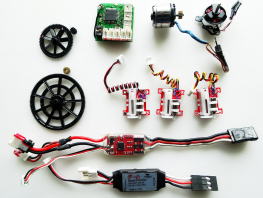
| 3)電池の搭載 | |||||
 |
 |
 |
 |
 |
|
| コネクターに電池接続 | 電池格納(スプリングにて押さえ) | 底カバー閉じ | |||
| 15 総括 |
| 15.1 総括 | ||
|