| ****第185**** |
2016年1月31日(日) |
| スケールモデル3号機 |
|
|
|
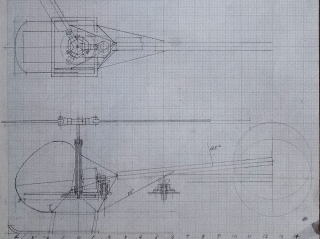
| Schweizer S-300Cを作る s=1/37 |
◆メインローターブレード3枚機を作ってみたい。
◆ トラス構造で剛性を持つスケール機を実現したい。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP03S |
3.2 |
| HP05S(5.8g) (予備) |
|
| サーボ |
ks-20(※2)(3個) |
4.0 |
| HCP100(※3) |
2.3 |
| スピードコントローラー |
XP-7A 4.9g |
4.9 |
| ギア |
検討 |
|
| wikipediaより借用 |
(※1:Walkera)、(※2:Kyosho)、(※3:HiSKY) |
19.6 |
|
 |
| 目標 |
|
①揚力/重量の比を前スケール機より大きくする。
②トラス構造のスケール感を出す。 |
|
|
- (6)リニアサーボ゙(HK1300)を組み込む
- リニアサーボの水平方向の動きを、クランクを組み込み回転に変換してサーボリンクロッドを垂直方向に動かせるようにした。
- ◆サーボと電池の干渉が見られたので、変換機構を短くしてサーボをメインシャフト側に下げた。
- ◆サイクリックの動きは下の動画に見るように確認出来た。 今後リンクロッドを組み込んでメインローターの動きを見ながら調整する。
-
-
|
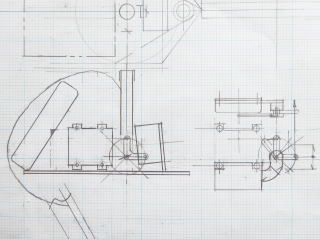 |
| (6)HK1300を組み込み(クランク機構作製→機体への組み込み) |
 |
 |
 |
 |
 |
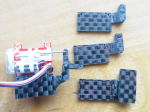
| カーボン板(t1)ケガキ |
切り出し |
組立、クランク軸はφ0.6sus |
 |
 |
 |
電池スペース確保の為クランク機構を短くする→ |
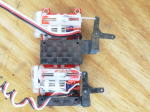 |
| サーボに組付け確認、プッシュプル軸はφ0.6sus |
機体組み込み確認 |
|
長さ比較(下:改造後) |
 |
 |
 |
 |
|
| ラダーサーボの取り付け位置を見直した。そのための固定板を追加 |
サーボ組み込み確認 |
|
- 次回(186)に続く
- リンクロッドの長さを決める。
|
|
