| **** 第314**** |
2018年8月5日(日) |
| スケールモデル4号機 |
|
|
|
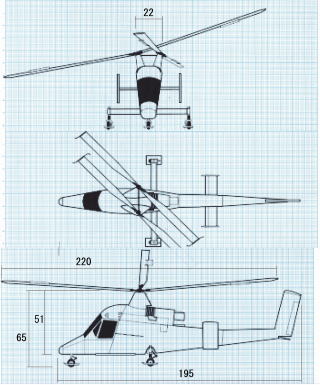
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
WK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (3)サーボ組み込み
- (d)ピッチリンケージ作製(続き)
- リンケージの長さを調整可能にするロッドの検討。
- 前回、中間分割で、片側にボルト、反対側にナットを形成してボルトとナット締結にすることで作製に着手した(下図)。しかし加工を容易にするためボルト形成の代わりにM1の
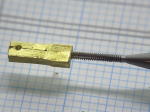
ネジを埋め込む構造にした(下写真)。
-
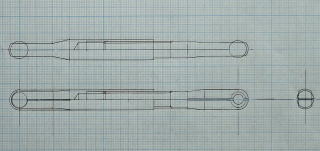 |
| ピッチリンクロッド(ボルトとナット締結) |
|
|
| ピッチリンクロッド作製(続き) |
 |
 |
 |
 |
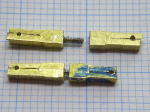 |
| 位置決め冶具を用いてM1ネジ下穴加工 |
|
スリッド潰し(圧接)
|
M1ネジたて |
M1ネジ埋め込み、連結 |
- 次回(315)
- ピッチリンケージ作製(続き) 、ローターヘッドにリンクボール組み込み
。
|
|