| **** 第318**** |
2018年9月2日(日) |
| スケールモデル4号機 |
|
|
|
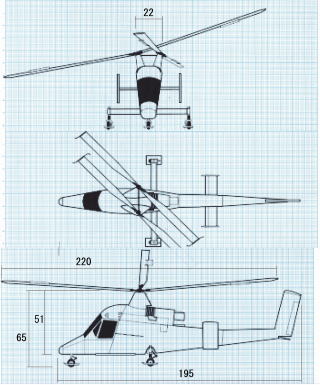
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
WK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (3)サーボ組み込み
- (e)スワッシュプレート改修
- スワッシュプレートのボールスタッド取付強度の改善
- スワッシュプレートへのボールスタッドの取り付け(第299、第300)はボールの足を圧入してある。しかし、ボール部とピッチロッドの着脱での外れ難い時の力加減でスタッドが抜ける箇所が出た(圧入の保持力不足)。
- このことから、ボールスタッドの取り付け方法を再考することにした。例えば、下写真のネジ込み等。
-
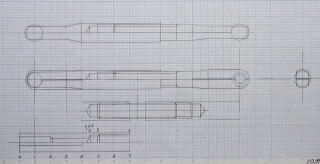 |
| ピッチリンクロッド(ネジ締結) |
|
|
| スワッシュプレート改修(ボールスタッド取付再考) |
|
 |
 |
 |
 |
 |
|
ボールスタッドの抜け |
ボールスタッド再考の一案:φ1susにネジとボール成形、スタッド部をねじ込んだ後にボール部を残して不要軸を切り落とす |
リンクロッド動き確認 |
|