| **** 第317**** | 2018年8月26日(日) |
| スケールモデル4号機 | |||
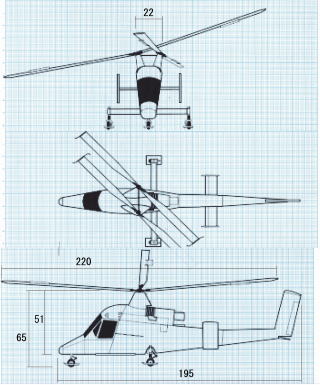
| Kaman K-MAX を作るK s=1/67 | ◆交差反転ローターはどんなことが起こるのか ◆テールローター無しで機体の回転制御を上手くできるか。 |
||
|
 |
|||||||||||||||||||||||||
|
||||||||||||||||||||||||||

| 1. 構想検討 |
| 1.5 ブレード迎角度可変構造 |
|
 |
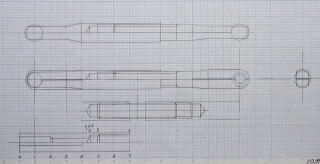
| リンクロッドの作製(続き) | |||||
 |
 |
 |
 |
 |
|
| リンクロッド | ボール接触面確認(分解) | ボールシャフト(φ1sus) | ボールシャフト組み込み確認 | ||
 |
 |
 |
 |
||
| ロッド組み込み確認 | ロックナット(φ1.5xt0.5、平取り1.2) |
組み込み確認 | |||
| 1.5 ブレード迎角度可変構造 | <前回に戻る> |
|