****第126**** 2014年11月30日(日)
|
|
 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。 |
|
 |
|||||||||||||||||
|
||||||||||||||||||
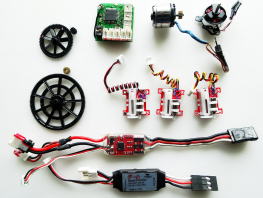
| 11 ベンチテスト |
| 11.2 テスト中の電圧とテールブレード回転速度の観察 | ||
|
 |
| (a) 安定化電源駆動 | |
 |
|
| (b) 電池駆動 | |
 |
|
| 12 飛行に挑戦 |
|