****第127**** 2014年12月7日(日)
|
|
 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。 |
|
 |
|||||||||||||||||
|
||||||||||||||||||
| 12 飛行に挑戦 |
| 12.1 準備 | ||
|
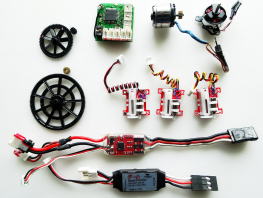
  サーボ組み込み |
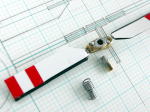
| (1)テールブレード作り直し | |||||
 |
 |
 |
 |
 |
|
| ブレードが軸から抜け落ち | ブレード保持部のスリ割り | 合わせ確認 | 保持軸半田付け | 保持部予備半田付け | |
| (2)テールブレード折損対策 | |||||
 |
 |
 |
 |
 |
|
| 迎え角度(18°)で位置決め | ブレード組立 | 折損 | ブレード保護スキッド | ||
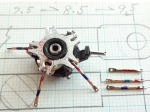
| (3)ピッチリンクを長いものに作り替え | |||||
 |
 |
||||
| 8.5mm→9.5mm | |||||
| (4)メインギアハブ修復 | |||||
 |
 |
 |
 |
 |
|
| 回転中にピン穴部分から破断(薄肉のため駆動力に耐えきれずピンで押し切られた) | ハブ作製:アルミ板から切り出し | ハブ部品:ネジ(M1)、ピン、ハブ、固定板、メインギア(ネジ穴2箇所明け) | ハブ取り付け | 裏:ハブ止め板 | |
| (5)サーボの機種変更 | |||||
 |
 |
 |
 |
 |
|
| サーボの主軸ギア抜け落ち | サーボ取り外し | サーボと保持板 | サーボアームの穴埋め:サーボリンクφ0.6に合わせるため φ1パイプ埋め) | サーボ組み込み確認 | |
| 12.1 飛行に挑戦 | ||
|