- ジャイロの扱いにうっかりミスが見つかり急遽改修した。
- 上昇させようとした時に機体が前傾すると、更に傾きが増して前のめりなり、前転するようにして床に激突する。
- エレベータージャイロの反応が、機体を前傾させるとスワッシュプレートも前傾していた。本来ならばスワッシュプレートは姿勢を持ち直す方向(逆方向に)に傾かなければならないのが逆方向に動ていた。
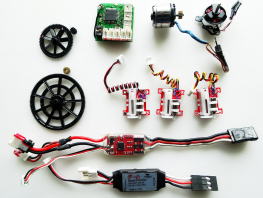
- 1)エレベータサーボの位置を移す(右図、下写真(1))
- ・フレームの前半分を作り直した。
- エレベータサーボとメインモーターを入れ替え、リンケージの上下動が逆になる様にサーボアームを回転軸に対して反対側にした。
- 其の場合、ステック操作方向とエレベーター方向が逆になるので送信機のリバース設定で同じ方向になるようにした。
- ・フレームの改造については、送信機のDEVO7Eでは設定変更で対応来るかも知れないが習熟不足で可否は分からない。
- 2)飛行に挑戦(下動画:バッテリー2個目)
- 短時間ではあるが浮揚させることが出来た。尚、動画の最後に突然テールブレードの回転が停止して高速自転しながら墜落した。
- 恐怖心が勝って未だ揚げることが出来ない。
- 墜落はしたものの、慣れれば何んとか飛行出来そうな感触は得た。
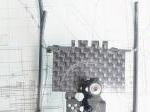
- 3)テールモーター付け根で分断(下写真(2))
- 墜落で、モーターのアウターローター部がグラついていた。取り外してみると付け根で折れていた。
- 次回までに改修方法を検討する。
|
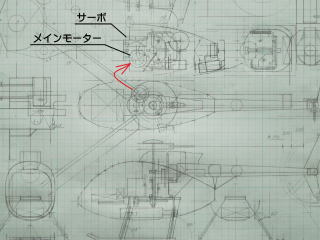
エレベータサーボの位置を移す
|
 MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。
MD500E:エアロパートナーズ社のフォトギャラリーからお借りしました。