| ****第192**** | 2016年3月20日(日) |
| スケールモデル3号機 | |||
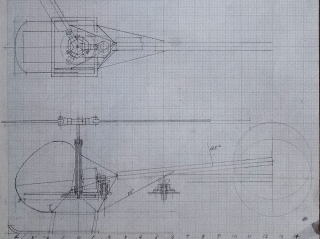
| Schweizer S-300Cを作る s=1/37 | ◆メインローターブレード3枚機を作ってみたい。 ◆ トラス構造で剛性を持つスケール機を実現したい。 |
||
|
 |
|||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||

| 5. 機体組立 |
| 5.5 テール振動対策(続き) |
|
 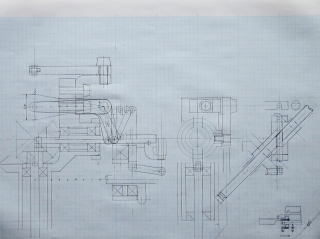 |
| (7)サーボの位置調整を可能にした | ||||
 |
 |
 |
 |
 |
| サーボにネジ板(t0.5黄銅)組み込み | フレームに長穴加工 | 取り付け(上下に微調整が出来る) | ||
 |
 |
|||
| 取り付け | ||||
| (8)サーボストロークの短縮 | ||||
 |
 |
 |
 |
|
| リンクがスワッシュプレートを押し付け | 当初のアーム | アームの出力側を短くした | ||
| 5.5 テール振動対策(続き) |
|