| **** 第294 **** |
2018年3月18日(日) |
| スケールモデル4号機 |
|
|
|
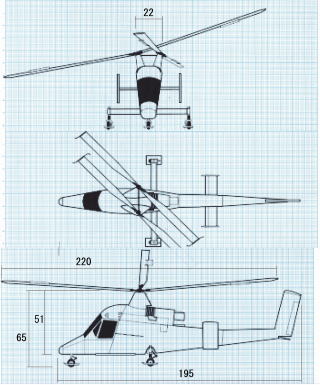
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
MK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (2)揚力測定
- ローターブレードの迎え角度と揚力の関係を送信機スロットルの出力(ステック目盛り)を変えて測定。
- 結果は最大揚力は60g程度(下グラフ)であった。目標は機体重量の1.5倍としたが、この結果では機体重量は40g以下で実現しなければならない。
- 機体重量はこれまでの経験から50g~60gになることをを考慮する必要があり、その場合の揚力は75g~90g必要となる。
- 次回から、揚力アップを検討(先ず単軸ローターの揚力確認)。
-
 |
| 揚力測定系 :揚力測定試験機、受信機(RX2636H-D)、台秤、ベンチテスト台、電源、回転計、送信機(写真外) |
|
|
ローターブレード迎え角度と特性
スロットル出力と特性
グラフのデータはグラフ化数値による
|
1.3 ローターブレード作製(続き) |
<前回に戻る> |
- 次回(295)
- 揚力向上対策(単軸ローターの揚力確認)。
|
|