| **** 第303 **** |
2018年5月20日(日) |
| スケールモデル4号機 |
|
|
|
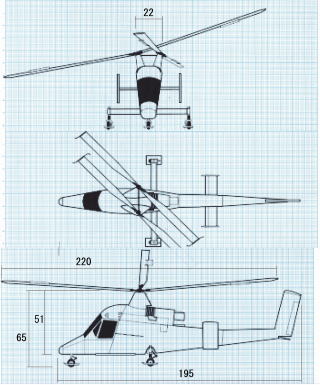
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
WK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (2)スワッシュプレートとサーボのリンケージ構造検討(続き)
- ◆スワッシュプレートを左右シャフトに組み込み確認(下写真)。
- ボールスタッドとサーボをどのような経路で連結するか検討する。
- ◆サーボWK02(上表使用予定部品)の発生力測定(下表写真)。
- 出力はアーム長さ8.5mmで60g程度あり、従来のサーボの3倍程の力が期待できる。 アームの長さを短く使えばこれ以上の力を発生させることができる。
- サーボ1個で2個のスワッシュプレートを動かしてみる。
-
 |
| スワッシュプレート組み込み確認 |
|
|
◆スワッシュプレート組立確認
|
 |
 |
|
|
|
| リンク逃げ溝(傾いた時のロッドとの干渉防止) |
3個から2個を選択して使用 |
|
|
|
| ◆サーボWK02の発生力測定 |
 |
 |
 |
|
|
| 測定方法は第184参照 |
|
|
- 次回(304)
- スワッシュプレートとサーボのワイヤー連結(続き)
|
|
