| ****第184**** | 2016年1月24日(日) |
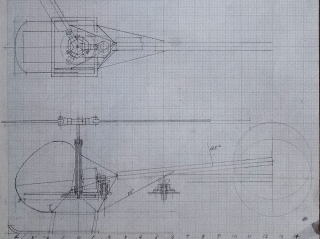
| スケールモデル3号機 | |||
| Schweizer S-300Cを作る s=1/37 | ◆メインローターブレード3枚機を作ってみたい。 ◆ トラス構造で剛性を持つスケール機を実現したい。 |
||
|
 |
|||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||

| 5. 機体組立 |
| 5.3 サーボ組み込み(続き) |
|
  |
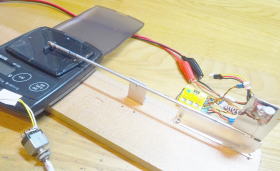

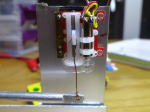
| (5)サーボの引き上げ力測定 | ||||
 |
 |
 |
 |
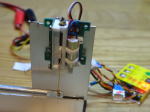 |
| (a)ks-20 | (b)HK1300(中国製) (モーター本体部:8mm) |
(c)HK1300(中国製) (モーター本体部:12mm) |
(d)HK1300(中国製) (cを上下逆さにして測定) |
(e)HCP100(※3) |
| 4.4g (3.8、4.5、5.0) |
17.2g (15.8、17.2、18.5) |
20.3g (19.8、18.1、23.0) |
20.7g (20.9、18.5、22.6) |
21.5g (21.8、23.2、19.6) |
| 5.3 サーボ組み込み(続き) |
|