| **** 第316**** |
2018年8月19日(日) |
| スケールモデル4号機 |
|
|
|
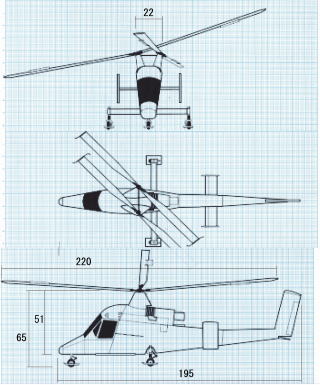
| Kaman K-MAX を作るK s=1/67 |
◆交差反転ローターはどんなことが起こるのか
◆テールローター無しで機体の回転制御を上手くできるか。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP05S |
5.8 |
| (HP08S:予備) |
|
| サーボ |
WK02(4個) |
10 |
| スピードコントローラー |
XP-7A |
4.9 |
| ギア |
検討 |
|
| flickr.comより借用 |
(※1:Walkera) |
25.9 |
|
 |
| 目標 |
|
①交差反転ローター実現。
②ラダー制御機構の実現。 |
|
|
- (3)サーボ組み込み
- (d)ピッチリンケージ作製(続き)
- 以前(第313回)は板材から削り出すように考えたが、今回は黄銅パイプ(φ1.3xφ0.55)を材料に作製(下写真)した。パイプにスリットを加工して、リンクボールを包み込む構造にした。
- リンクロッドからのボールの抜去力(軸方向)は5個の測定で350g~850gを確認(下動画)した。
- この程度の対抜去力であれば使える。次回は4組分を作製する。
- 最終適には機体組み込みでの稼働状態を見て判断する。
-
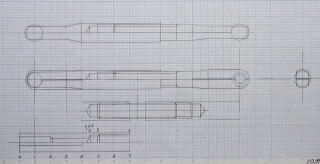 |
| ピッチリンクロッド(ネジ締結) |
|
|
| リンクロッドの作製 |
 |
 |
 |
 |
 |
| 黄銅パイプ(φ1.3xφ0.55)穴をφ0.7に拡張(深4.5) |
スリ割り中心出し冶具(穴:φ1.3、溝:0.4深2㎜) |
パイプをセットして糸鋸にてスリ割り |
 |
 |
 |
 |
 |
切り離し
|
M1深2加工(下穴φ0.8) |
ボール収容部形成(スリ割りにφ0.6susを挟んで溝部で圧接) |
 |
 |
 |
|
|
| 形成後と終端仕上げ |
ボール組み込み確認 |
|
|
|