| ****第208**** |
2016年7月10日(日) |
| スケールモデル3号機 |
|
|
|
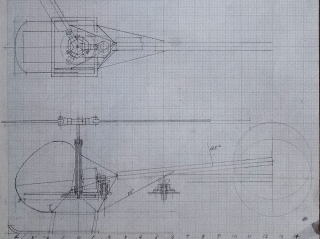
| Schweizer S-300Cを作る s=1/37 |
◆メインローターブレード3枚機を作ってみたい。
◆ トラス構造で剛性を持つスケール機を実現したい。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP03S |
3.2 |
| HP05S(5.8g) (予備) |
|
| サーボ |
ks-20(※2)(3個) |
4.0 |
| HCP100(※3) |
2.3 |
| スピードコントローラー |
XP-7A 4.9g |
4.9 |
| ギア |
検討 |
|
| wikipediaより借用 |
(※1:Walkera)、(※2:Kyosho)、(※3:HiSKY) |
19.6 |
|
 |
| 目標 |
|
①揚力/重量の比を前スケール機より大きくする。
②トラス構造のスケール感を出す。 |
|
|
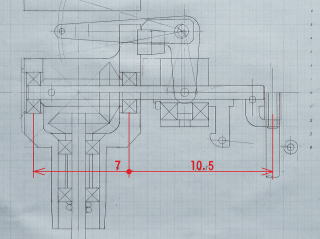
- (16)テールローター組み立て(ギアボックス作り直し続き)
- テールローター固定方法を今回から変更。
- 取り付けを強固にするため、パイプ締め付け(取り外し可能)にした。
- (17)自在継手の試作
- テール駆動は実機感を出すためトルクチューブ構造を採用し、振動の抑制にも期待してる。
- しかし、部品や組立の精緻、軸芯の真直度合、機体の剛性 等の不具合が関係して振動を誘発しているように思える。
- テールローターの振動を止める有効な方法を探すため、テール駆動軸の繫ぎに自在継手を試行してみる。
|
 |
| (16)テールローター固定方法変更 |
 |
 |
 |
|
|
| 締付けパイプ(内径:φ3.9)、アルミ材削り出し |
取り付け(締め付け)状態 |
|
|
| (17)自在継手の試作 |
 |
 |
 |
 |
 |
| (a)黄銅パイプ(2φxφ1)、ピン(φ0.5) |
(b)ピン保持部組み込み |
- 次回(209)に続く
- 自在継手での振動抑制の検証。
|
|
