| ****第212**** |
2016年8月7日(日) |
| スケールモデル3号機 |
|
|
|
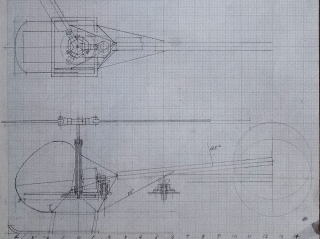
| Schweizer S-300Cを作る s=1/37 |
◆メインローターブレード3枚機を作ってみたい。
◆ トラス構造で剛性を持つスケール機を実現したい。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
| メインモーター |
HP03S |
3.2 |
| HP05S(5.8g) (予備) |
|
| サーボ |
ks-20(※2)(3個) |
4.0 |
| HCP100(※3) |
2.3 |
| スピードコントローラー |
XP-7A 4.9g |
4.9 |
| ギア |
検討 |
|
| wikipediaより借用 |
(※1:Walkera)、(※2:Kyosho)、(※3:HiSKY) |
19.6 |
|
 |
| 目標 |
|
①揚力/重量の比を前スケール機より大きくする。
②トラス構造のスケール感を出す。 |
|
|
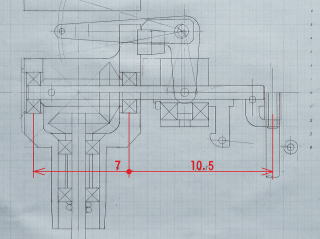
- (21)ラダー制動確認
- ラダーサーボを当初の位置のままでベンチテスト行ったが、まったく制動が効かず機体が勢いよく回転した。
- プッシュプルロッドが機体各部で接触していることから何らかの抵抗があるのではと仮定し、サーボをテールブームに移設した。
- プッシュプルロッドを周囲と接触しない状態でベルクランクに繫げてベンチテストを行った。
- 結果を下の動画に示す。未だサーボの設定条件(送信機側)を詰めていない状態ではあるが、制動が効くことが確認できた。
- 次回はラダーサーボを元の位置に戻せないか検討する。
|
 |
| ラダー制動確認 |
 |
 |
 |
 |
 |
| ラダーサーボをテールブームに仮移設 |
- 次回(213)に続く
- ラダーサーボを元の位置に戻す。
|
|

