| **** 第257 **** | 2017年6月25日(日) |
| スケールモデル3号機 | |||
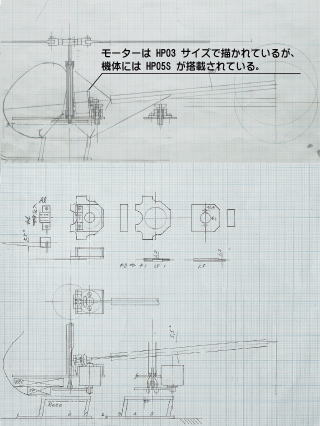
| Schweizer S-300Cを作る s=1/37 | ◆メインローターブレード3枚機を作ってみたい。 ◆ トラス構造で剛性を持つスケール機を実現したい。 |
||
|
 |
|||||||||||||||||||||||||||
|
||||||||||||||||||||||||||||

| 6. 飛行調整 |
| 6.1 飛行調整 |
|
 歯車構成
|
||||||||||||||||||||||||||||||||
| ラダー評価(ベンチテスト)と揚力測定 | |||||
 |
 |
 |
|||
| テール駆動歯車(モーター:z13/テール:z20) | ラーダー評価(ベンチテスト) | 揚力測定系 | |||
回転数、電流、揚力の送信機スティック位置との関係(値は下表による)
| 電源電圧(v) | 送信機のスティック回転位置(目盛) | ||||||||
| グラフNo | 測定項目 | 1 | 2 | 3 | 4 | 5 | 6 | ||
| (10) | 回転数 | 4.0v | 2730 | 3990 | 4102 | 3960 | 3450 | 2870 | |
| 4.1v | 2710 | 4050 | 4360 | 4120 | 3720 | 2960 | |||
| (rpm) | 4.2v | 2770 | 4080 | 4330 | 4230 | 4070 | 3480 | ||
| (11) | 電流 | 4.0v | 1.16 | 2.16 | 2.85 | 2.93 | 2.96 | 2.68 | |
| 4.1v | 1.10 | 2.18 | 2.92 | 3.16 | 3.18 | 2.93 | |||
| (A) | 4.2v | 1.31 | 2.45 | 2.97 | 3.41 | 3.45 | 3.37 | ||
| (12) | 揚力 | 4.0v | 14.0 | 40.7 | 55.3 | 59.3 | 58.7 | 48.0 | |
| 4.1v | 12.7 | 41.7 | 62.3 | 69.3 | 68.0 | 52.7 | |||
| (g) | 4.2v | 16.3 | 48.0 | 65.3 | 77.3 | 81.0 | 66.0 | ||
| 注:①表内値は3回繰り返しの平均値 | |||||||||
| 6.1 飛行調整 | <前回に戻る> |
|