| **** 第262 **** |
2017年7月30日(日) |
| スケールモデル3号機 |
|
|
|
| Schweizer S-300Cを作る s=1/37 |
◆メインローターブレード3枚機を作ってみたい。
◆ トラス構造で剛性を持つスケール機を実現したい。 |
 |
使用予定部品(案)と重さ |
g |
| 受信機 |
RX2636H-D(※1) |
5.2 |
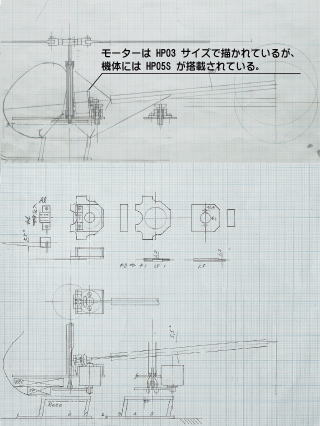
| メインモーター |
HP03S |
3.2 |
| HP05S(5.8g) (予備) |
|
| サーボ |
ks-20(※2)(3個) |
4.0 |
| HCP100(※3) |
2.3 |
| スピードコントローラー |
XP-7A 4.9g |
4.9 |
| ギア |
検討 |
|
| wikipediaより借用 |
(※1:Walkera)、(※2:Kyosho)、(※3:HiSKY) |
19.6 |
|
 |
| 目標 |
|
①揚力/重量の比を前スケール機より大きくする。
②トラス構造のスケール感を出す。 |
|
|
- (6)テール 振れ対策(続き)
- ◆ラダー評価(ベンチテスト)(その6)
- 前回、浮揚時間が極端に短く、高さも床近辺で高く浮揚できなかった(異常状態かも知れない)。
- 浮揚できなくなった時の電池電圧は4v強(下写真)で未だ使える電圧で、これも異常と思える。
- ★モーター出力確認
- 出力測定結果を下のグラフに第258回との比較で示した。
- 回転数、消費電流、揚力共に極端に低下した。
- ★モーター分解確認(下写真)
- 断線を確認した。
- ★モーターのステータコイル巻き直し(下写真)
- 線径φ0.2(現物はφ0.18?)x9巻き/極。
- <次回は巻き直したモーターを組み込んで出力確認をする。>
|
|
| 出力測定 |
飛行後の電圧 |
モーターの分解確認 |
 |
 |
 |
 |
 |
| 回転数、電流、揚力:下グラフ |
4.05v |
テスターによる抵抗値確認 |
分解(取り出し部でヨジレ) |
 |
 |
|
|
|
| x:不導通 |
断線 |
|
|
|
| モーターのステータコイル巻き直し |
 |
 |
 |
 |
 |
| 線径:φ0.2(2EUW) |
リード線は三本分割(取り出し部のヨジレでのショート懸念を回避) |
表面の損傷確認(異常無し) |
 |
|
|
|
|
| 完成(回転確認済み) |
|
|
|
|
電源電圧4.2vでの回転数、電流、揚力の送信機スティック位置との関係(値は下表による)
| グラフNo |
測定項目 |
測定時期 |
送信機のスティック回転位置(目盛) |
| 1 |
2 |
3 |
4 |
5 |
6 |
| (1) |
回転数 |
第258 |
3020 |
4290 |
4650 |
4570 |
4020 |
3240 |
| (rpm) |
今回(第262) |
2250 |
3360 |
3450 |
3210 |
2790 |
2490 |
| (2) |
電流 |
第258 |
1.19 |
2.57 |
3.34 |
3.66 |
3.62 |
3.52 |
| (A) |
今回(第262) |
1.33 |
2.33 |
2.74 |
2.78 |
2.63 |
2.64 |
| (3) |
揚力 |
第258 |
16.3 |
49.3 |
74.3 |
81.7 |
74.3 |
60.7 |
| (g) |
今回(第262) |
10.0 |
27.0 |
32.0 |
36.0 |
35.0 |
31.0 |
|
注:表内値は3回繰り返しの平均値 |
- 次回(263)に続く
- 巻き直したモーターを組み込んで出力確認。
|
|