- (3)総括
- 「スケールモデル Schweizer S-300Cを作る」の最終回として纏める。
- ◆操縦はステック操作への反応が遅く感じられ、思うように飛行できていない。スケール機体としては小型ながら実機感は出せたように思う。
-
- 1.目標について
- ①揚力/重量
- 前スケール機より大きくするとしていたが小さくなった。
- 前スケール機:100/65=1.5 今回機体:81.7/58.4=1.4
- ②トラス構造のスケール感を出す。
- 機体の剛性を得るため構造体としても機能を持たせ、外観からも一応のスケール感を出せた。
- 2.成果
- (1)飛行と各部の動き・・・下動画
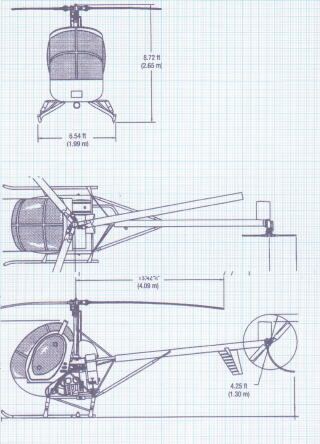
- (2)スケールモデル Schweizer S-300Cの緒元 ・・・下表
- (3)実機との比較・・・下写真
- 3.雑感
- ①飛行中のステック操作への反応が遅く感じられる
- 原因はサーボの力不足にある。
- 例えばテールブレードの回転中にスワッシュプレートを動かすベルクランクの作用端に瞬時に加える力は最大100g程必要になる。しかし、サーボの出力は20g程度で、これをアーム比(12:6.5)で約2倍に拡大して40g程度にしているが、瞬時の反応は期待できない。
- ★メインローターに於いてもテールより大きなブレードをサイクリック作動させるので、同様なことが起きていると考えられる。
- ★今後の機体ではサーボの出力に余裕を持たせたい。
- ②スケールモデルSchweizer S-300Cの作製は今回で終わる。
- 今後、飛行練習等で気づきがあった場合に掲載したい。
|
|






 ★借用先
★借用先



